[지난글]
지난 시간에 아두이노 듀에 보드를 이용하여 topic을 pub 하고 echo로 직접 확인하는 과정을 수행했다.
https://stupidly-honest.tistory.com/39
아두이노 + ROS 2 튜토리얼
개요 이번 글은 아두이노에서 ROS topic을 발행하여 값을 확인하는 과정을 기록한 글이다. Version Dependencies Arduino SAM Boards (32-bits ARM Cortex-M3) : 1.6.11 micro-ros-arduino : ros-humble 2.0.7 Ubuntu : 22.04 ROS 2 Version
stupidly-honest.tistory.com
Subscriber [Arduino Due]
이번시간에는 아두이노 듀에 보드로 값을 pub 하여 모터가 동작하도록 프로그래밍을 해보자
먼저 듀에보드를 subscriber로 만든 후, pub 했을 때 반응을 보도록 하자
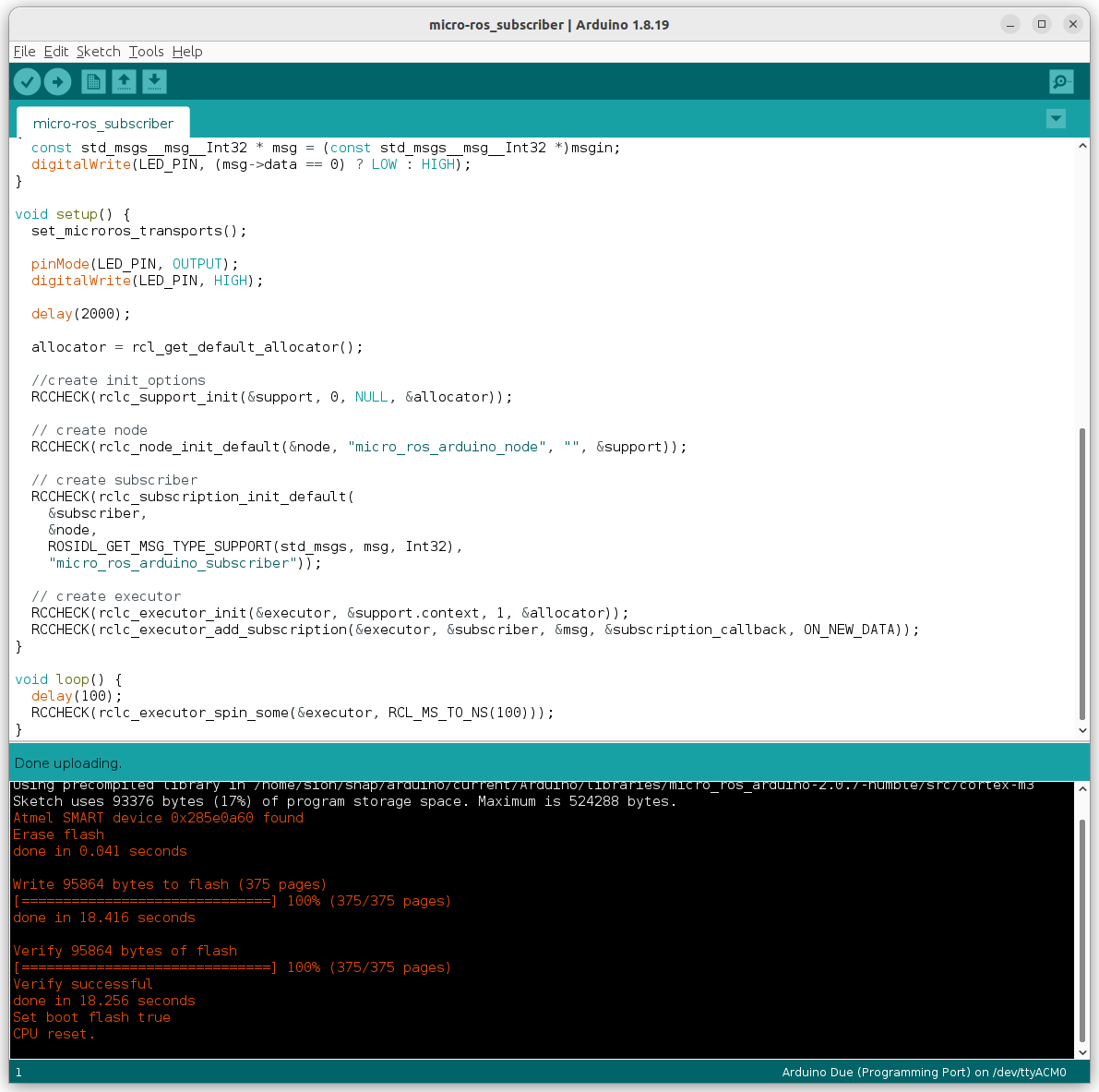
지난 글과 유사하게 이번에는 예제에서 micro-ros_subscriber를 실행시킨후, 터미널을 열어서 ros2 run을 실행한다.
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyACM0
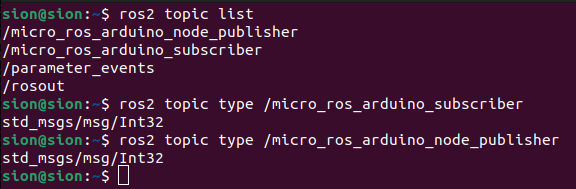
토픽의 타입을 알아보자
std_msgs/msg/Int32 이다.
이렇게 해서 Arduino due 보드는 subscriber가 되었다.
이제 보드에 topic을 publish 한 다음 결과를 보자

1번 터미널 : ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyACM0
2번 터미널 : ros2 topic list
3버 터미널 : ros2 topic echo /micro_ros_arduino_subscriber
4번 터미널 : ros2 topic pub /micro_ros_arduino_subscriber --once std_msgs/msg/Int32 data:\ 0\
최종 결과 : 3번 터미널에서 data 값이 들어오는 것을 확인할 수 있다.
Subscriber [Motor]
다음 듀에 보드로 pub 하는 값에 따라 모터를 동작시켜보자
준비물 및 참고 자료는 아래와 같다.
Cytron motor driver : MDD20A
Board : Arduino Due SAM 32bit -M3
Arduino Sketch : 1.8.19
ROS Version : ROS 2 humble
Cytron 깃 허브
https://github.com/CytronTechnologies/CytronMotorDriver
GitHub - CytronTechnologies/CytronMotorDriver: Arduino library for Cytron motor drivers.
Arduino library for Cytron motor drivers. Contribute to CytronTechnologies/CytronMotorDriver development by creating an account on GitHub.
github.com

Data sheet
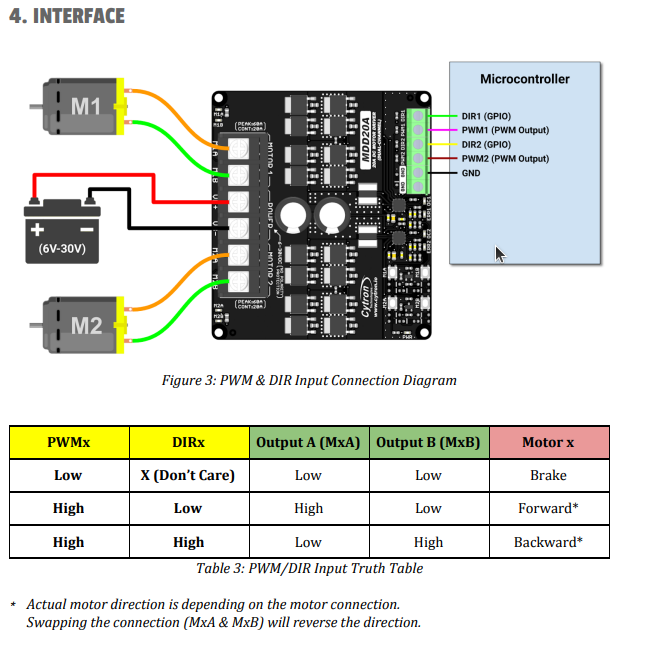
위 데이터 시트를 참고해서 회로를 구성한다.
코드는 아래와 같다.
#include <micro_ros_arduino.h>
#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/int32.h>
#include "CytronMotorDriver.h"
// ROS 2 토픽을 구독하기 위한 구조체와 변수 선언
rcl_subscription_t subscriber;
std_msgs__msg__Int32 msg;
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
#define LED_PIN 13
// 모터 드라이버 설정
CytronMD motor1(PWM_DIR, 3, 4); // PWM 1 = Pin 3, DIR 1 = Pin 4.
CytronMD motor2(PWM_DIR, 9, 10); // PWM 2 = Pin 9, DIR 2 = Pin 10.
// 오류 체크 매크로 정의
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}
// 오류 발생 시 LED를 깜빡이게 하는 함수
void error_loop(){
while(1){
digitalWrite(LED_PIN, !digitalRead(LED_PIN));
delay(100);
}
}
// 토픽 메시지를 수신할 때 호출되는 콜백 함수
void subscription_callback(const void * msgin)
{
const std_msgs__msg__Int32 * msg = (const std_msgs__msg__Int32 *)msgin;
// 토픽 값을 확인하고 모터를 제어
int motorSpeed = msg->data;
if (motorSpeed > 0) {
// 모터를 전진으로 설정
motor1.setSpeed(motorSpeed);
motor2.setSpeed(motorSpeed);
} else if (motorSpeed < 0) {
// 모터를 후진으로 설정
motor1.setSpeed(-motorSpeed);
motor2.setSpeed(-motorSpeed);
} else {
// 모터를 정지
motor1.setSpeed(0);
motor2.setSpeed(0);
}
}
void setup() {
set_microros_transports();
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, HIGH);
delay(2000);
allocator = rcl_get_default_allocator();
// 초기화 옵션 생성
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// 노드 생성
RCCHECK(rclc_node_init_default(&node, "go_back_node", "", &support));
// 토픽 구독자 생성
RCCHECK(rclc_subscription_init_default(
&subscriber,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"go_back_subscriber"));
// 실행자 생성
RCCHECK(rclc_executor_init(&executor, &support.context, 1, &allocator));
// 실행자에 구독자 추가 및 콜백 함수 설정
RCCHECK(rclc_executor_add_subscription(&executor, &subscriber, &msg, &subscription_callback, ON_NEW_DATA));
}
void loop() {
delay(100);
RCCHECK(rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)));
}먼저 아두이노 스케치에서 코드를 컴파일 한다.
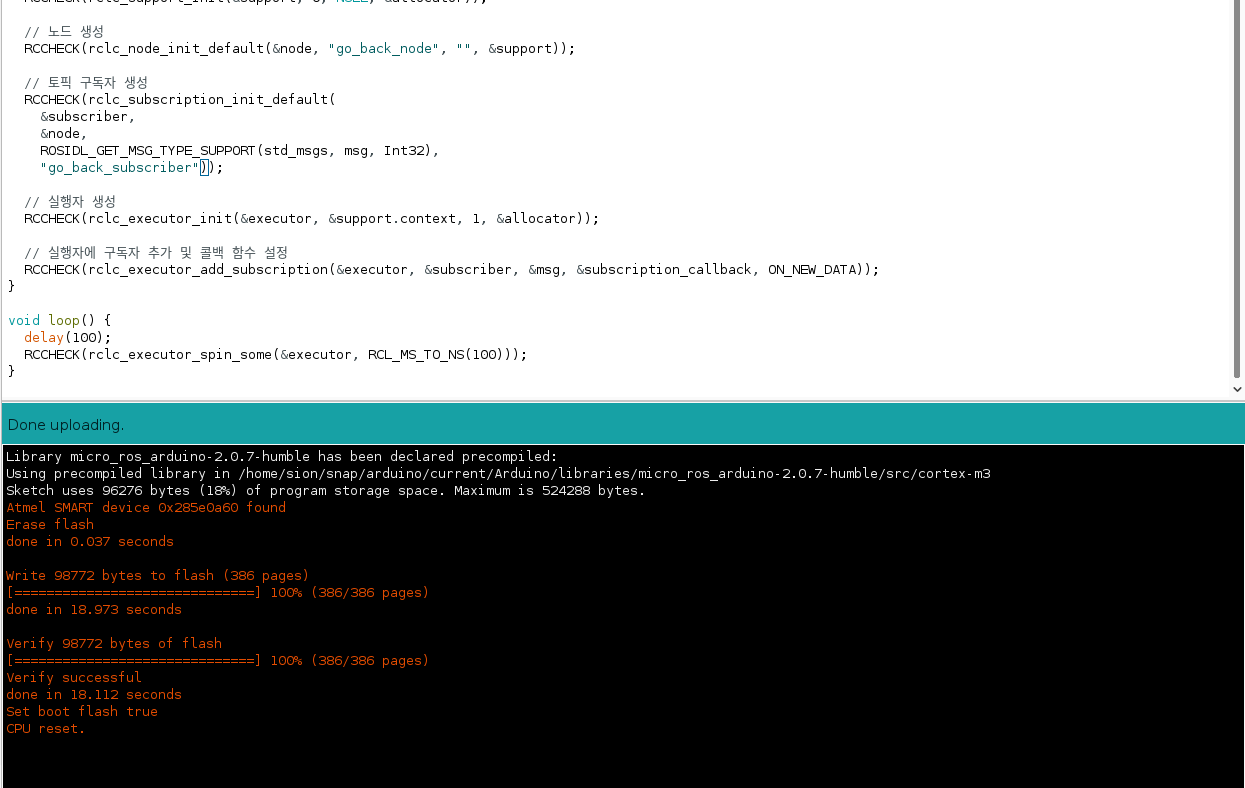
실행방법은 이전과 유사하다.
다른 점은 노드 이름을 micro_ros_arduino_subscriber에서 go_bact_subscriber로 수정했다는 점과
코드에서 확인할 수 있는 값에 따라 모터를 제어하는 부분이다.
cytron 깃허브에 있는 예제 pwm_dir _dual 과 micro_ros 예제의 micro_ros_subscriber 코드를 이용했다.

메세지 포맷에 맞게 publish 하는 것을 주의하자
Demo Video
https://youtube.com/shorts/fPd9ORIVrfM?feature=share
감사합니다.
'Robotics 🤖 > Ubee' 카테고리의 다른 글
| [Ubee] catkin_make에서 cakin build로 빌드 툴 변경하기(feat : em Error) (2) | 2023.11.24 |
|---|---|
| cmd_vel topic으로 로봇 액추에이터 구동하기 (0) | 2023.09.16 |
| cmd_vel topic을 위한 파라미터 수정하기(ROS) (0) | 2023.09.16 |
| 아두이노 Rosserial 통신 (UNO, Noetic) (0) | 2023.09.16 |
| 아두이노 + ROS 2 튜토리얼 (12) | 2023.08.28 |



