이전 글을 참고 하시면 좋습니다
https://stupidly-honest.tistory.com/4
ARM64에서 Docker 위에 ROS2 설치하기
Docker Install 1. apt에 Docker 저장소를 추가 (마지막 줄에서 amd64가 아닌 arm64) sudo apt-get update sudo apt-get install \ apt-transport-https \ ca-certificates \ curl \ gnupg \ lsb-release curl -fsSL https://download.docker.com/linux/ubunt
stupidly-honest.tistory.com
이미지 기반으로 컨테이너를 생성할 때 사용하는 명령어
docker run -it -d --rm -e DISPLAY=:0 -v /tmp/.X11-unix:/tmp/.X11-unix <이미지 이름>-d 태그가 유지시켜주는 역할을 합니다.
이외에 DISPLAY, X11 관련 명령어가 도커에서 GUI를 볼 수 있도록 합니다.
Warming up
xeyes 실행하기
1. 도커 컨테이너 안에서 x11 관련 앱을 설치해 줍니다
apt-get update
apt-get install x11-apps2. 로컬 터미널을 새로 열어서 로컬 GUI와 컨테이너를 연결해주는 명령어를 실행합니다.
xhost +3. 컨테이너 터미널로 돌아와 xeyes 앱을 실행합니다.
xeyes
rviz2 install
apt-get install ros-humble-rviz2rviz2 실행

하나하나 에러를 해결해 봅시다
sudo apt-get install libgl1-mesa-dev
export LIBGL_ALWAYS_SOFTWARE=1위 명령어는 GPU 가속을 하지 않겠다는 명령어 입니다
라즈베리파이는 GPU가 없으니 굳이 할 필요가 없겠지요?

에러가 줄긴 좀 줄었습니다.
export XDG_RUNTIME_DIR=/tmp/runtime-root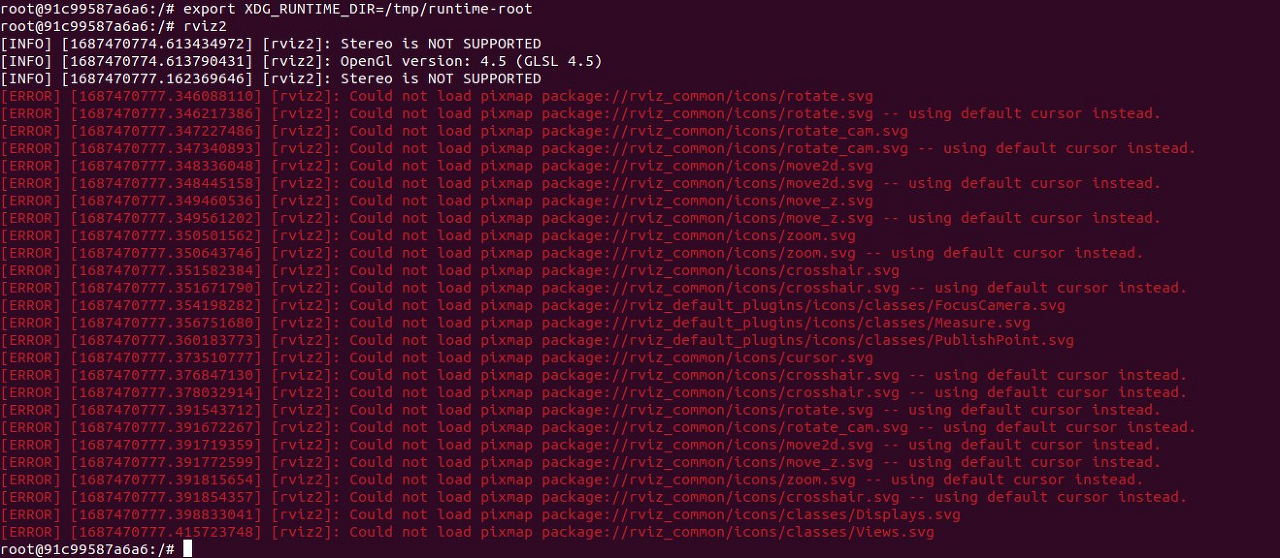
빨간 에러를 해결하기 위해 아래 깃허브를 참고하였습니다.
https://github.com/ros-visualization/rviz/issues/1154
apt-get --reinstall install libqt5svg5
그리드가 보이지 않지만, 에러는 발생하지 않았습니다
이후에 작업을 통해 계속해서 계선해 나가볼게요
우분투 22.04 Docker GUI, 그래픽 드라이버 이슈
아래 링크를 참고하여 이슈를 해결하였습니다
https://github.com/ros2/rviz/issues/948
Black Screen on version 11.2.5 · Issue #948 · ros2/rviz
When I open Rviz2 with the command 'Rviz2' I get a black screen where the grid and models usually are. This was working on 11.2.4. OS: Windows 10 host, Rviz2 running a WSL Docker container Note: My...
github.com

add-apt-repository ppa:kisak/kisak-mesa
apt update
apt upgrade
기존에 있는 mesa 그래픽 드라이버 패키지를 kisak-mesa 버전으로 개선, 업데이트 된 것 같습니다
Result

정상적으로 그리드가 보이는 것을 확인할 수 있었습니다 :)
다음글
https://stupidly-honest.tistory.com/5
Docker 컨테이너에서 rviz 실행하기 (with RPi, Docker, GUI) [2]
이전 글을 참고 하시면 좋습니다 https://stupidly-honest.tistory.com/4 ARM64에서 Docker 위에 ROS2 설치하기 Docker Install 1. apt에 Docker 저장소를 추가 (마지막 줄에서 amd64가 아닌 arm64) sudo apt-get update sudo apt-get i
stupidly-honest.tistory.com
'ROS Project🦾' 카테고리의 다른 글
| Jetson Nano에 Docker 설치 및 Rviz 실행하기 [1] (0) | 2023.07.06 |
|---|---|
| Gazebo simulation(ROS2, Docker) (0) | 2023.07.05 |
| Mac M1에서 가제보 실행하기 (Install Gazebo on Mac (using homebrew) (3) | 2023.07.05 |
| Mac M1에서 가제보 실행하기 (Install Gazebo on Mac (using homebrew) (0) | 2023.07.04 |
| ARM64에서 Docker 위에 ROS2 설치하기 [1] (0) | 2023.06.26 |



