모터드라이버 MD200T 2개와 MDH100 4개를 구입했다. 24V 배터리는 2개를 사용할 예정이다
이것을 가지고 실외 이동로봇을 제작하려고 한다.
https://www.mdrobot.co.kr/BLDCMotordriverDCstore/?idx=160
듀얼채널 BLDC제어기 DC파워 엠디로봇 모터드라이버 DC12V~48V, 200W MD200T
정밀제어, 제어기 프로그램 제공, 통신지원, 고성능제어기, 서보모터 제어기
www.mdrobot.co.kr
https://www.mdrobot.co.kr/inwheelmotor-store/?idx=274
MDH100 감속기, 엔코더, 모터가 바퀴 내부에 장착된 일체형 인휠모터
제품 소개감속기/엔코더/모터가 바퀴 내부에 장착된 일체형 인휠모터입니다.우수한 저속 제어성능과 토크성능을 구현하며 컴팩트한 구동부 설계로 배달로봇 등 소형 이동로봇 플랫폼 제작에
www.mdrobot.co.kr
https://lunavolt.com/product/detail.html?product_no=479&cate_no=59&display_group=1
7S6P 25.9V 28.8Ah 리튬이온 21700 로봇 산업용
PLEASE SELECT THE DESTINATION COUNTRY AND LANGUAGE : SHIPPING TO : 가나(GHANA) SHIPPING TO : 가봉(GABON) SHIPPING TO : 가이아나(GUYANA) SHIPPING TO : 감비아(GAMBIA) SHIPPING TO : 과테말라(GUATEMALA) SHIPPING TO : 그레나다(GRENADA) SHIPPI
lunavolt.com
아래 사진은 전선 연결을 완료한 모습이다 정말 많다.

이전에 문의한 내용을 바탕으로 모터드라이버 한 개의 좌우 모터를 연결하여 연결하려고 한다.
먼저 모터와 모터드라이버를 받으면 많은 양의 선들이 나를 압도하지만 매뉴얼을 보고 잘 따라하면 쉽게 연결할 수 있다.
인휠 모터의 데이터 시트(왼쪽)와 모터 드라이버에 데이터 시트(오른쪽)을 보고 잘 납땜하면 된다
데이터 시트는 블로그 처음 부분에 링킹 한 페이지 아래로 스크롤 하면 있음
추가 모터드라이버 Color pin map
배선 연결을 마무리 했으면 MDAS라는 엠디 로봇에서 제공하는 테스트 프로그램이 있다
그것을 가지고 테스트할 수 있다
MDAS 사용하기
사용방법은 간단하지만 메뉴얼이 정말 어렵게 나와있다...내가 이해를 잘 못하는건가 업데이트가 안되어있는 건가
나 시켜주면 내가 더 깔끔하게 만들어 줄 수 있지만, 전체 내용은 잘 모르기 때문에 간단하게 테스트 하는 방법을 공유하고자 한다
먼저 RS485와 모터드라이버를 연결한 다음 RS485의 USB 포트를 데스크탑에 꽂는다
그다음 프로그램을 실행시킨다
주의할 점 : 1. RS485를 연결한 후, 2. 모터드라이버와 배터리를 연결 후 프로그램을 열어야 한다
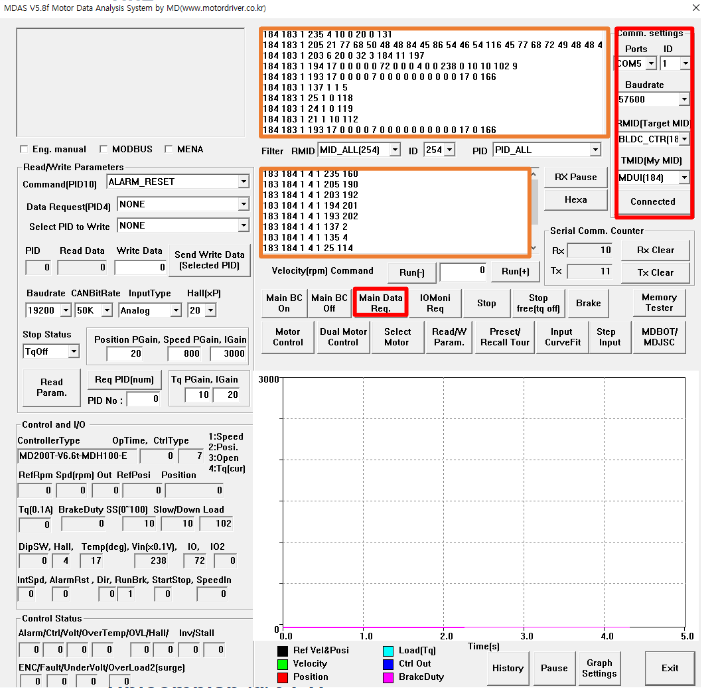
프로그램을 실행시키면 아래 사진과 같이 창 하나가 나온다
오른쪽 위 큰 박스에서 포트와 보드레이트를 설정해준다 (baudrate default 는 192000으로 되어 있을 거임
192000으로 해도 되긴하나, 필자는 해당 프로그램으로 57600으로 변경한다음 연결해본 것 뿐임)
그리고 Connected 버튼을 누른다
아래 작은 주황색 박스는 Tx로 전송하는 부분이고 위에 흰박스는 Rx로 데이터를 받을 때 출력하는 창이다
오른쪽 위에 큰 빨간 박스 부분의 세팅이 끝났으면 아래 Main Data Req 버튼을 눌러서 통신이 개통되는지 확인한다.
통신이 개통되면 버튼 클릭 시 양쪽 주황색 박스에 동시 다발적으로 값들이 나타남
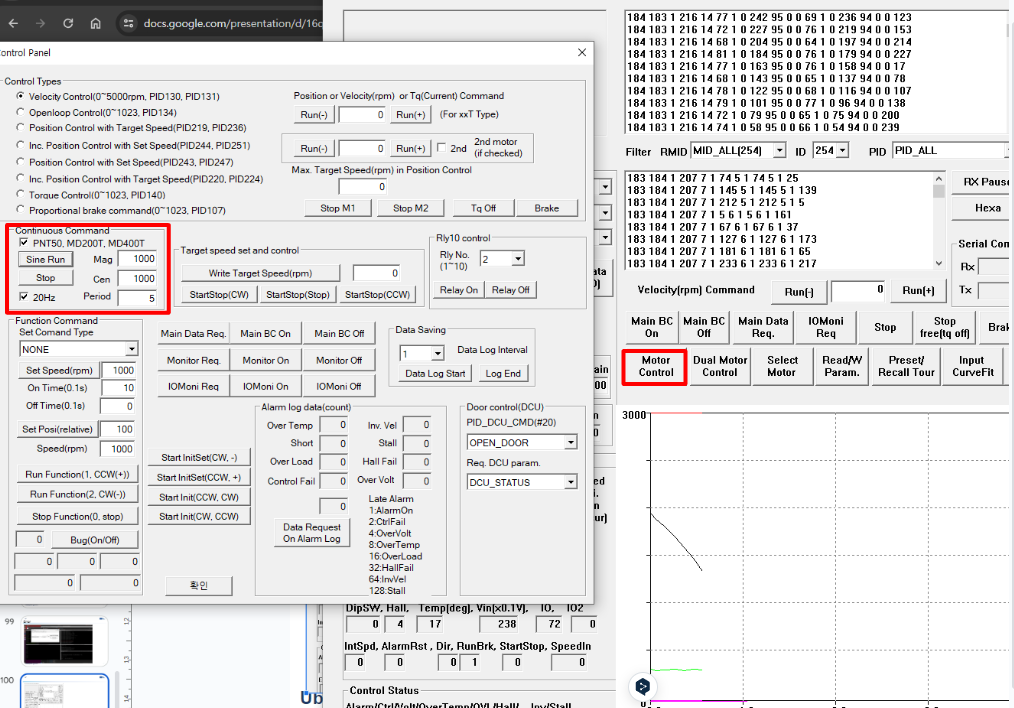
그다음 MDAS 프로그램으로 모터를 구동시켜보자
오른쪽 부분에 Motor Control 버튼을 클릭하면 왼쪽 작은 창이 나타난다
그 다음 Continous Command 부분에서 체크박스를 클릭하고 Sine Run 버튼을 클릭하면
모터가 싸인파 형태를 그리며 켜지고 꺼지는 것을 확인할 수 있다.
다음 블로그에서는 ROS를 활용하여 모터를 구동시켜보자
'Robotics 🤖 > Olaf' 카테고리의 다른 글
| MD로봇 MD200T, MDH100 인휠모터 테스트 (MDAS 프로그램) (2) | 2024.02.21 |
|---|---|
| MD로봇 RS485 인식 에러 해결(Linux), Unable to open port (2) | 2024.01.29 |
| MD로봇 인휠모터 ROS로 구동하기 (2) (0) | 2024.01.24 |
| 프로젝트 개요 : 제설 로봇 만들기 (0) | 2024.01.24 |



