현재 MD200T 2개(모터드라이버) 와 MDH0100 (인휠모터) 4개로 실외 이동 로봇을 만드는 중이다
모터드라이버와 인휠 모터는 MD로봇 제품을 사용하고 있다
https://www.mdrobot.co.kr/BLDCMotordriverDCstore/?idx=160
듀얼채널 BLDC제어기 DC파워 엠디로봇 모터드라이버 DC12V~48V, 200W MD200T
정밀제어, 제어기 프로그램 제공, 통신지원, 고성능제어기, 서보모터 제어기
www.mdrobot.co.kr
https://www.mdrobot.co.kr/inwheelmotor-store/?idx=274
MDH100 감속기, 엔코더, 모터가 바퀴 내부에 장착된 일체형 인휠모터
제품 소개감속기/엔코더/모터가 바퀴 내부에 장착된 일체형 인휠모터입니다.우수한 저속 제어성능과 토크성능을 구현하며 컴팩트한 구동부 설계로 배달로봇 등 소형 이동로봇 플랫폼 제작에
www.mdrobot.co.kr
MDAS프로그램으로 이것저것 만지다가 모터에 값이 전달되지 않는 이슈가 있었다
다행히도 잘 작동되었을 때 파라미터를 저장했기 때문에 이를 이용해서 복구하는 방법을 기록하고자 한다
저장한 파라미터는 아래 파일에 업로드 했다
안되시는 분이 있다면 내가 지금부터 알려드리는 방법으로 테스트해보길 바란다
먼저 내가 성공했더 파라미터
MD200T 한개로 MDH100 2개 제어 성공한 파라미터 파일
1. 위 파일을 다운 후 MDAS 프로그램을 실행시킨다
2. 인휠모터와 MDAS 프로그램이 서로 통신이 가능한지 확인해 본다
<확인 방법>
a. Port 설정, Baudrate 설정 후 Connected 버튼을 누른다
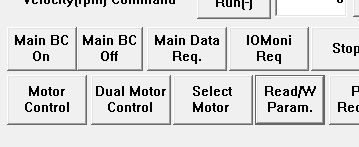
b. Main Data Req. 버튼을 눌러서 아래 작은 박스에 송신 메시지 위에 큰 박스에 수신 메시지가 표시되는지 확인

3. Read/W Param 버튼을 클릭하여 다운 받은 파일을 업로드 한다
Open File 버튼 눌러서 다운 받은 파일 더블클릭한 다음, Write Param 으로 덮어써주면 된다

4. 테스트
맨 왼쪽 아래에 있는 Motor Contorl 버튼을 누른 후, 위 체크박스를 누른 후, Sine Run 버튼을 클릭하여
모터가 동작하는 것을 확인할 수 있다

추가
모터가 방향이 반대로 간다 그러면 다음과 같은 방법으로 해결할 수 있다


Write Data에 숫자를 0 또는 1로 바꿔주면 된다
'Robotics 🤖 > Olaf' 카테고리의 다른 글
| MD로봇 RS485 인식 에러 해결(Linux), Unable to open port (2) | 2024.01.29 |
|---|---|
| MD로봇 인휠모터 ROS로 구동하기 (2) (0) | 2024.01.24 |
| MD로봇 인휠 모터 구동하기 (1) (13) | 2024.01.24 |
| 프로젝트 개요 : 제설 로봇 만들기 (0) | 2024.01.24 |



