사용 보드 : Jetson Nano 4GB
도커 이미지 : ros noetic
라이다 : G4
이전에 라즈베리파이4에 도커를 설치후 ROS2와 rviz2를 실행하였습니다.
이번에는 젯슨나노에서 noetic 도커 이미지를 설치 후 rviz를 띄워 시각화를 해보겠습니다.
전 라즈베리파이편과 유사하여 구체적인 설명은 생략하겠습니다.
1. 먼저 ROS noetic 이미지를 받아줍니다.
docker pull arm64v8/ros:noetic2. 컨테이너 생성하기
docker run -it --privileged -d --name <원하는_이름> -e DISPLAY=:0 -v /tmp/.X11-unix:/tmp/.X11-unix arm64v8/ros:noetic3. 컨테이너 접속하기
docker ps #컨테이너 이름 확인 명령어
docker exec -it <컨테이너 이름>4. 필요한 패키지 설치하기
apt-get update #패키지 업데이트
apt-get install -y nano tmux x11-apps
Warming UP
워밍업을 통해 GUI가 정상적으로 실행되는지 확인한다.
워밍업 하는 방법은 대략 다음과 같다.
#로컬 터미널에서
host +
#컨테이너 터미널에서
xeyeshttps://stupidly-honest.tistory.com/5
Docker 컨테이너에서 rviz 실행하기 (with RPi, Docker, GUI) [2]
이전 글을 참고 하시면 좋습니다 https://stupidly-honest.tistory.com/4 ARM64에서 Docker 위에 ROS2 설치하기 Docker Install 1. apt에 Docker 저장소를 추가 (마지막 줄에서 amd64가 아닌 arm64) sudo apt-get update sudo apt-get i
stupidly-honest.tistory.com

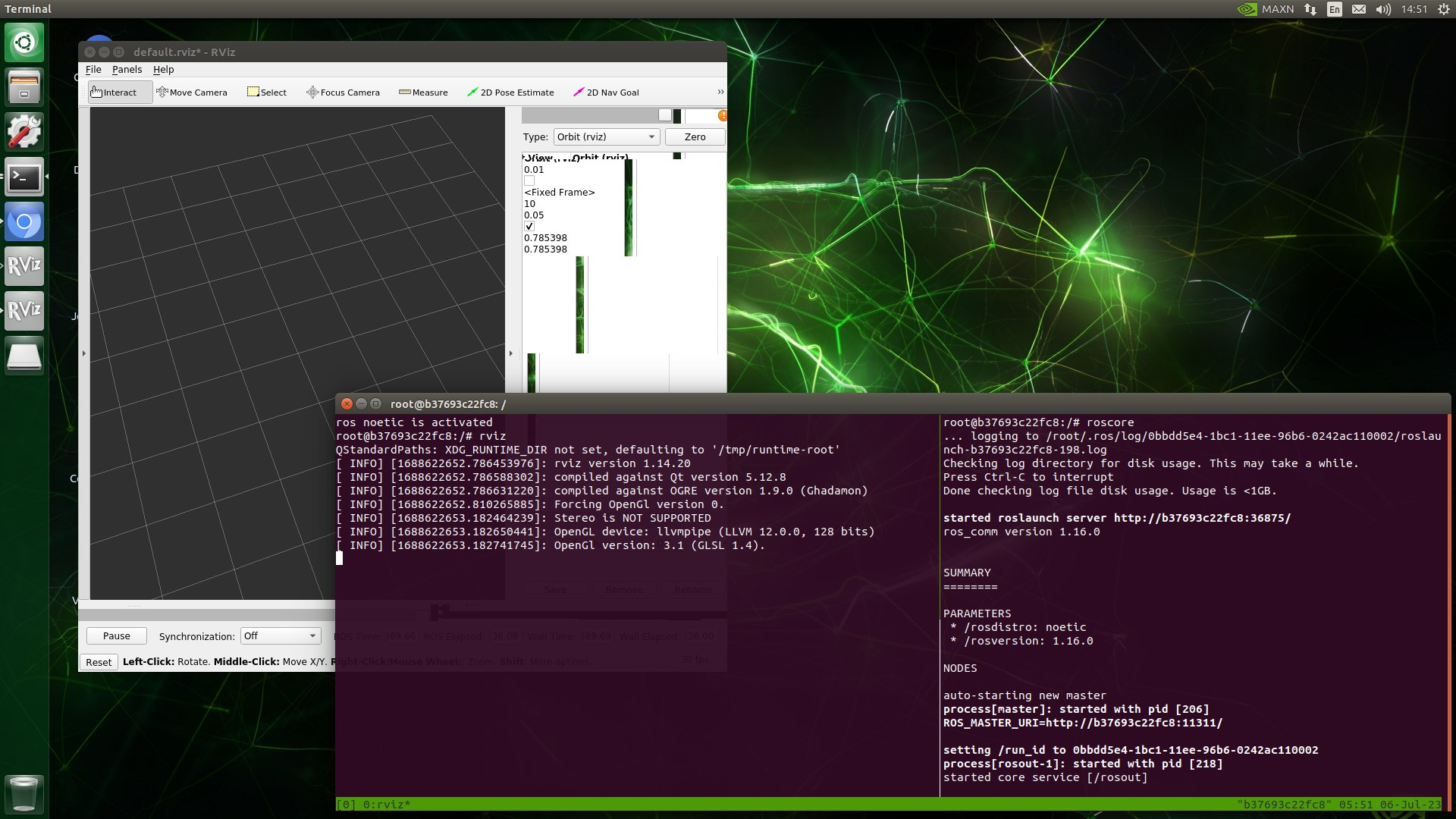
5. rviz 실행하기
tmux를 이용하여 터미널을 반절로 나눈다.
#터미널 반절 나누기, tmux 단축키
Ctrl + b, Shif + %한쪽 터미널에는 roscore 명령어 입력
다른쪽 터미널에는 rivz 명령어 입력
결과
다음 글
https://stupidly-honest.tistory.com/17
Jetson Nano에 YD LiDAR G4 연결하기
젯슨나노에 YD LiDAR G4를 연결해 보겠습니다. 사용 보드 : Jetson Nano 4GB 환경 : Ubuntu 20.04 + noetic 도커 컨테이너 라이다 : YD LiDAR G4 이전 글을 참고하면 좋습니다. https://stupidly-honest.tistory.com/15 Jetson Nano
stupidly-honest.tistory.com
'ROS Project🦾' 카테고리의 다른 글
| Jetson Nano에서 LiDAR 데이터(point cloud data) 저장하기 [3] (0) | 2023.07.17 |
|---|---|
| Jetson Nano에 YD LiDAR G4 연결하기 [2] (0) | 2023.07.06 |
| Gazebo simulation(ROS2, Docker) (0) | 2023.07.05 |
| Mac M1에서 가제보 실행하기 (Install Gazebo on Mac (using homebrew) (3) | 2023.07.05 |
| Mac M1에서 가제보 실행하기 (Install Gazebo on Mac (using homebrew) (0) | 2023.07.04 |


