반응형
이번시간에는 젯슨나노에서 G4 라이다 데이터를 저장하고 csv파일로 변환하는 작업을 진행해볼 계획입니다.
사용 보드 : Jetson Nano 4GB
환경 : Ubuntu 20.04 + noetic 도커 컨테이너
라이다 : YD LiDAR G4
먼저 LiDAR를 작동시켜 줍니다.
roslaunch ydlidar_ros_driver lidar_view.launch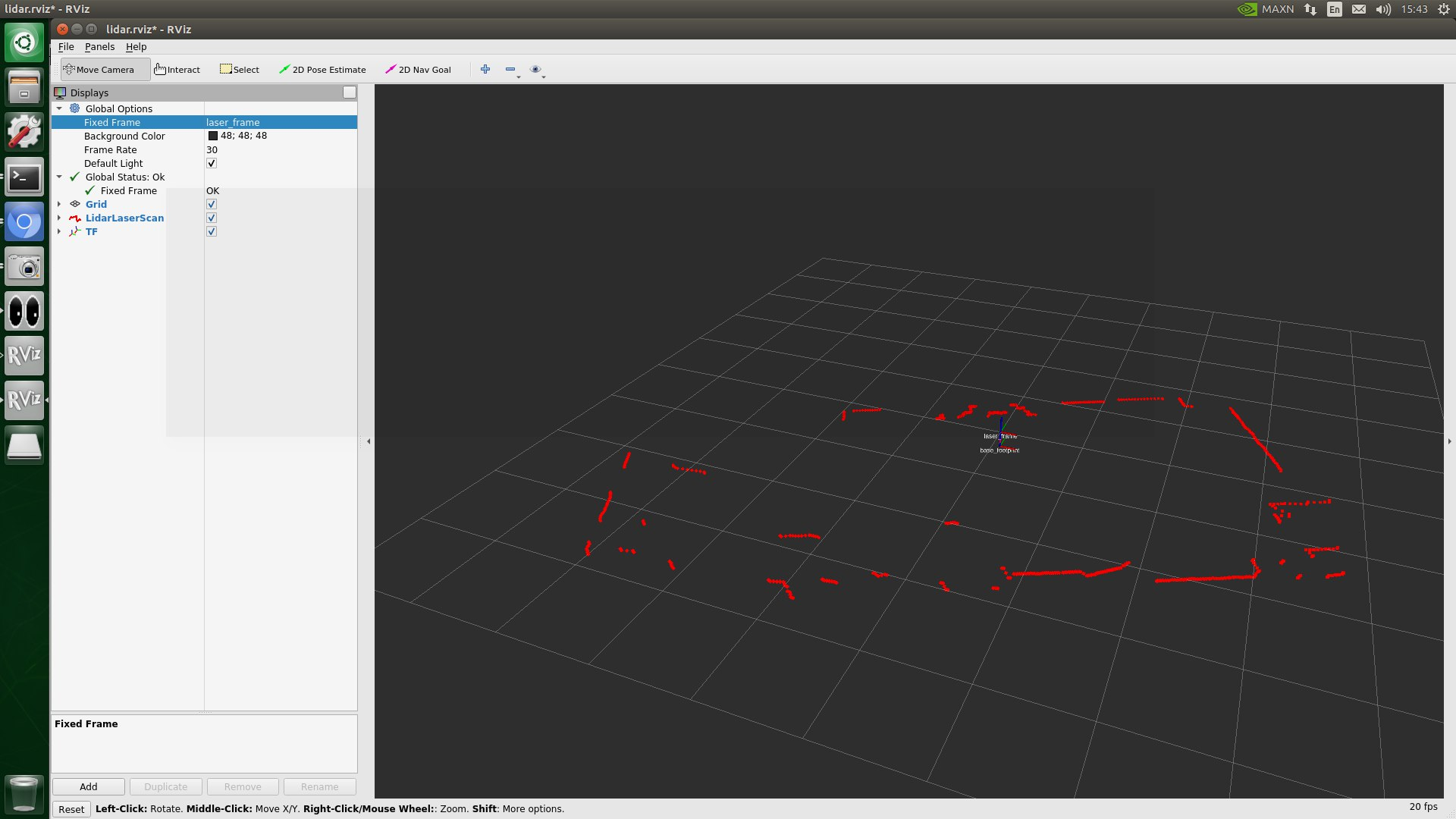
이렇게 라이다가 point cloud를 생성하는 것을 rviz로 확인할 수 있습니다.
참고
혹시 G6 라이다를 사용하신다면 lidar_view.launch 파일을 다음과 같이 수정하시면 됩니다.
(기본으로 lidar_view.launch 파일은 lidar.launch을 include하기 때문에 이부분을 G6_G7.launch 파일로 수정)
<launch>
<include file="$(find ydlidar_ros_driver)/launch/G6_G7.launch" />
<!-- <include file="$(find ydlidar_ros_driver)/launch/lidar.launch" /> -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find ydlidar_ros_driver)/launch/lidar.rviz" />
</launch>
ROSBAG 파일 저장
ROSBAG 파일은 ROS 메시지 데이터를 저장하는 데 사용되며, 포인트 클라우드 데이터를 포함한 다양한 유형의 데이터를 기록할 수 있습니다. 아래는 포인트 클라우드 데이터를 ROSBAG 파일로 저장하는 단계입니다.
명령어 형식은 다음과 같습니다.
rosbag record -O <name>.bag <topic>
ROSBAG 파일 CSV 파일로 변환
rosbag파일을 CSV파일로 변환해봅시다.
방법 1
rostopic을 활용하여 bag 파일을 csv로 직접변환하기
$ rostopic echo -b NAME.bag -p TOPIC_NAME > CSVNAME.csv
방법 2
https://github.com/AtsushiSakai/rosbag_to_csv 깃허브 이용하기
반응형
'ROS Project🦾' 카테고리의 다른 글
| 2D LiDAR에 obstacle_detector 라이브러리 적용하기 [5] (2) | 2023.07.26 |
|---|---|
| JetsonNano에 USB 카메라 사용하기 (rviz) [4] (0) | 2023.07.18 |
| Jetson Nano에 YD LiDAR G4 연결하기 [2] (0) | 2023.07.06 |
| Jetson Nano에 Docker 설치 및 Rviz 실행하기 [1] (0) | 2023.07.06 |
| Gazebo simulation(ROS2, Docker) (0) | 2023.07.05 |



