반응형
[지난글]
https://stupidly-honest.tistory.com/30
DJI Tello ROS2 드라이버 설치 [2]
https://github.com/ptrmu/ros2_shared GitHub - ptrmu/ros2_shared: Shared utilities for ros2 Shared utilities for ros2. Contribute to ptrmu/ros2_shared development by creating an account on GitHub. github.com https://github.com/GalBrandwine/tello_ros#install
stupidly-honest.tistory.com
지난글에 이어 gazebo 시뮬레이션에서 드론을 작동시켜보자
1. gazebo에서 드론 spawn 하기
ros2 launch tello_gazebo simple_launch.py2. 다른 터미널 열고 rqt 실행
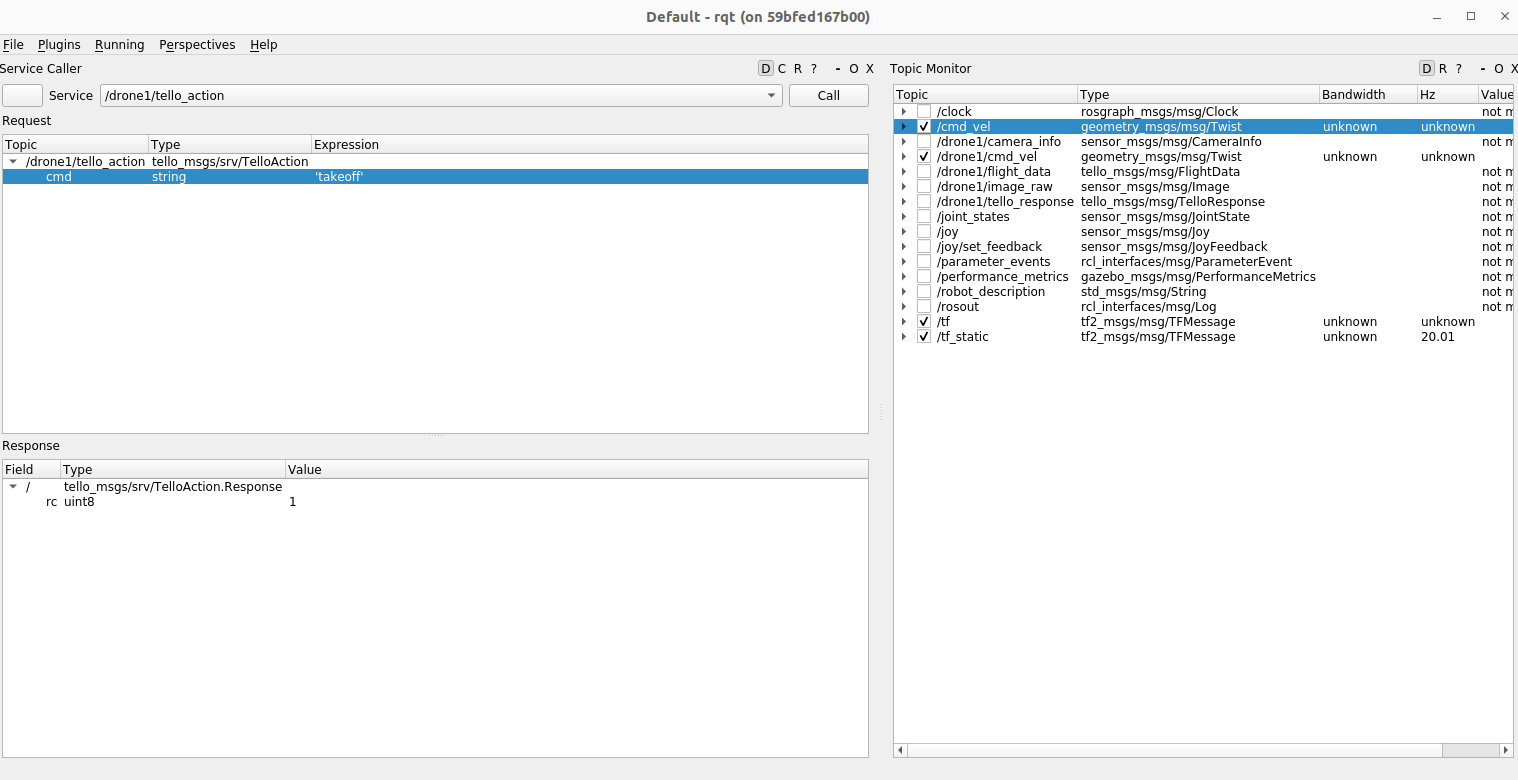
rqt플러그인을 Services -> Services Caller 선택 후 Service를 /drone1/tello_action으로 선택 후 오른쪽에 있는 토픽을 아래 사진과 같이 체크한다.
그리고 Expression 에서 'takeoff'를 입력 후 Call 버튼을 클릭 한 다음, 답변을 기다리면 드론이 이륙하는 것을 확인할 수 있다. (land 입력하면 착륙함)

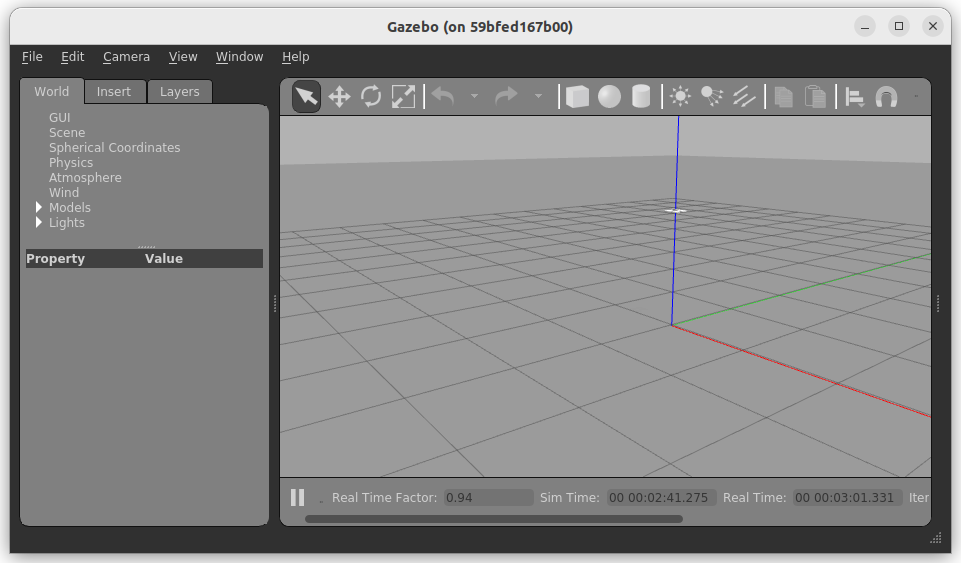
결과
드론이 시뮬레이션 상에서 이륙하는 것을 확인할 수 있다.
터미널로 실행하기
ros2 service call /drone1/tello_action tello_msgs/srv/TelloAction "{cmd: 'takeoff'}"
ros2 service call /drone1/tello_action tello_msgs/srv/TelloAction "{cmd: 'land'}"
ros2 service call /drone1/tello_action tello_msgs/srv/TelloAction "{cmd: 'rc 0 0 0 20'}"
ros2 service call /drone1/tello_action tello_msgs/srv/TelloAction "{cmd: 'battery?'}"
반응형
'Robotics 🤖 > Drone SW 🚁' 카테고리의 다른 글
| DJI Tello drone 파이썬 프로그래밍 (0) | 2023.08.14 |
|---|---|
| DJI Tello ROS kinetic 프로그래밍 환경 구축하기 (1) | 2023.08.14 |
| DJI Tello ROS2 드라이버 설치 [2] (1) | 2023.08.13 |
| DJI Tello 프로그래밍을 위한 ros2 foxy 설치하기(docker) [1] (0) | 2023.08.12 |
| DJI Tello ros2 프로젝트 (0) | 2023.08.12 |

