

QGroundControl이란?
- 오픈소스 드론 지상 제어 스테이션 소프트웨어
- 드론을 비롯한 다양한 유형의 무인 항공기를 제어하고 모니터링하는데 사용
- MavLink 프로토콜을 사용하여 드론과 통신
- 자동 이착륙, 임무 플랜 등 다양한 기능 제공
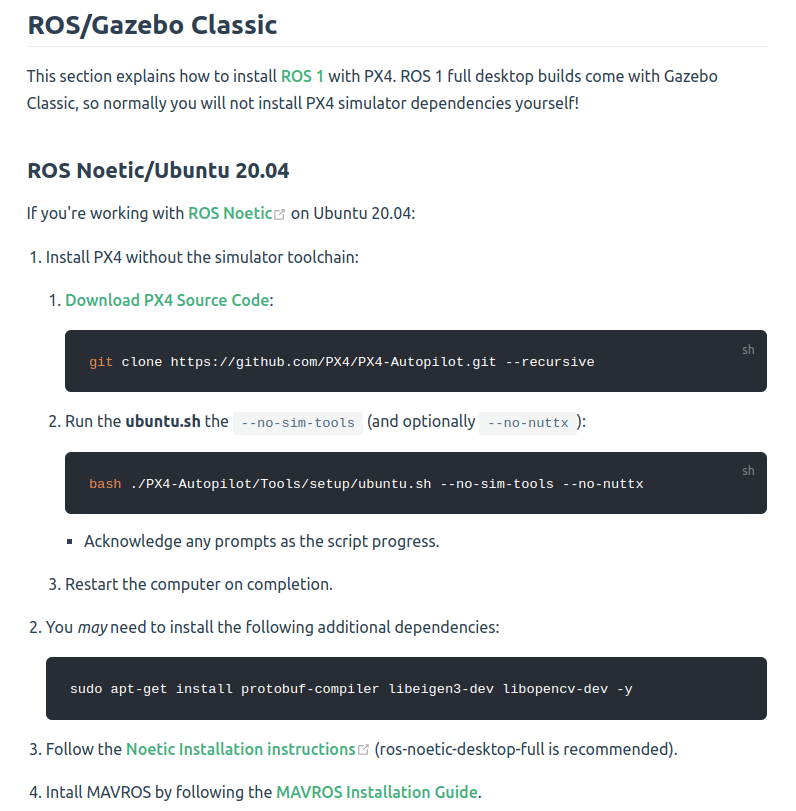
1. ROS with MAVROS Installation Guide
https://docs.px4.io/main/en/dev_setup/dev_env_linux_ubuntu.html#rosgazebo
Ubuntu Development Environment | PX4 User Guide (main)
Ubuntu Development Environment The following instructions set up a PX4 development environment on the Ubuntu Linux LTS (opens new window) versions supported by PX4. This includes: 18.04 (Bionic Beaver), 20.04 (Focal Fossa), and Ubuntu 22.04 (Jammy Jellyfis
docs.px4.io
2. QGC Installation Guide
https://docs.qgroundcontrol.com/master/en/qgc-user-guide/getting_started/download_and_install.html
Download and Install | QGC Guide (master)
docs.qgroundcontrol.com

3. Result
다운로드한 QGC 이미지를 더블클릭하면 실행된다


다음 장에서는 qgroundcontrol에서 명령을 줘서 가제보 시뮬레이션에서 드론을 움직여 보도록 하겠습니다!
'ROS Project🦾' 카테고리의 다른 글
| [ROS] VLP-16 ROS Driver 사용하기 (ROS-noetic) (2) | 2024.03.01 |
|---|---|
| PX4를 이용하여 드론 제어하기 [2] (0) | 2024.02.14 |
| ROS gazebo에서 image 넣기, How to build a world with real image as ground plane (0) | 2024.01.31 |
| jackal_navigation 파라미터 분석하기 (1) | 2024.01.25 |
| Jetson AGX Xavier에 Docker ROS image 설치하기 (2) | 2023.09.16 |



