반응형
ROS Version : Noetic
Ubuntu Version : 20.04
SBC : Lattepanda 3 delta
VLP : VLP Puck LITE (16CH)
준비물
- 벨로다인 라이다
- 라이다 인터페이스 박스
- LAN 케이블
- 전원 케이블
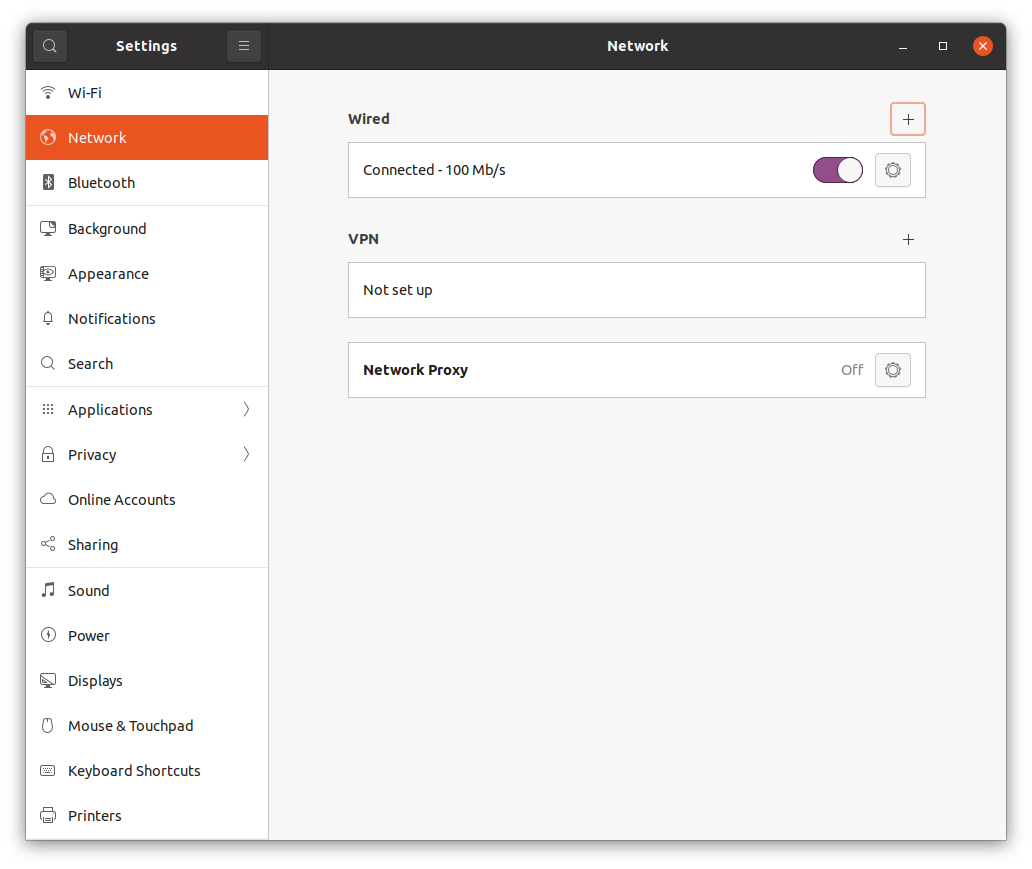
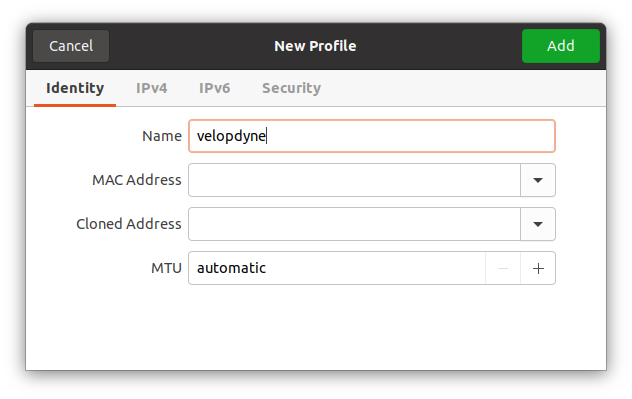
1. 네트워크 세팅
환경설정을 들어가면 이미 LAN 인터넷 케이블이 연결된 것을 알 수 있다
여기서 + 버튼을 눌러서 벨로다인 인터페이스 박스 < - > SBC 사이에 LAN 케이블 연결 설정을 추가하자

2. localhost에서 확인하기
- a. 라이다 전원을 켜고 인터페이스 박스에서 케이블을 SBC와 연결
- b. 192.168.1.201을 브라우저에 입력하여 연결이 정상적으로 됬는지 확인

3. ROS package 설치
sudo apt-get install ros-noetic-velodyne -y
cd <ROS_workspace>
catkin_make
정상적으로 빌드가 완료 되었다
4. Implemation
//terminal 1
roslaunch velodyne_pointcloud VLP16_points.launch
//terminal 2
rviz
rviz를 실행시킨 후 할 일
- Fixed Frame을 map -> velodyne으로 변경
- Point cloud 2 Topic을 추가
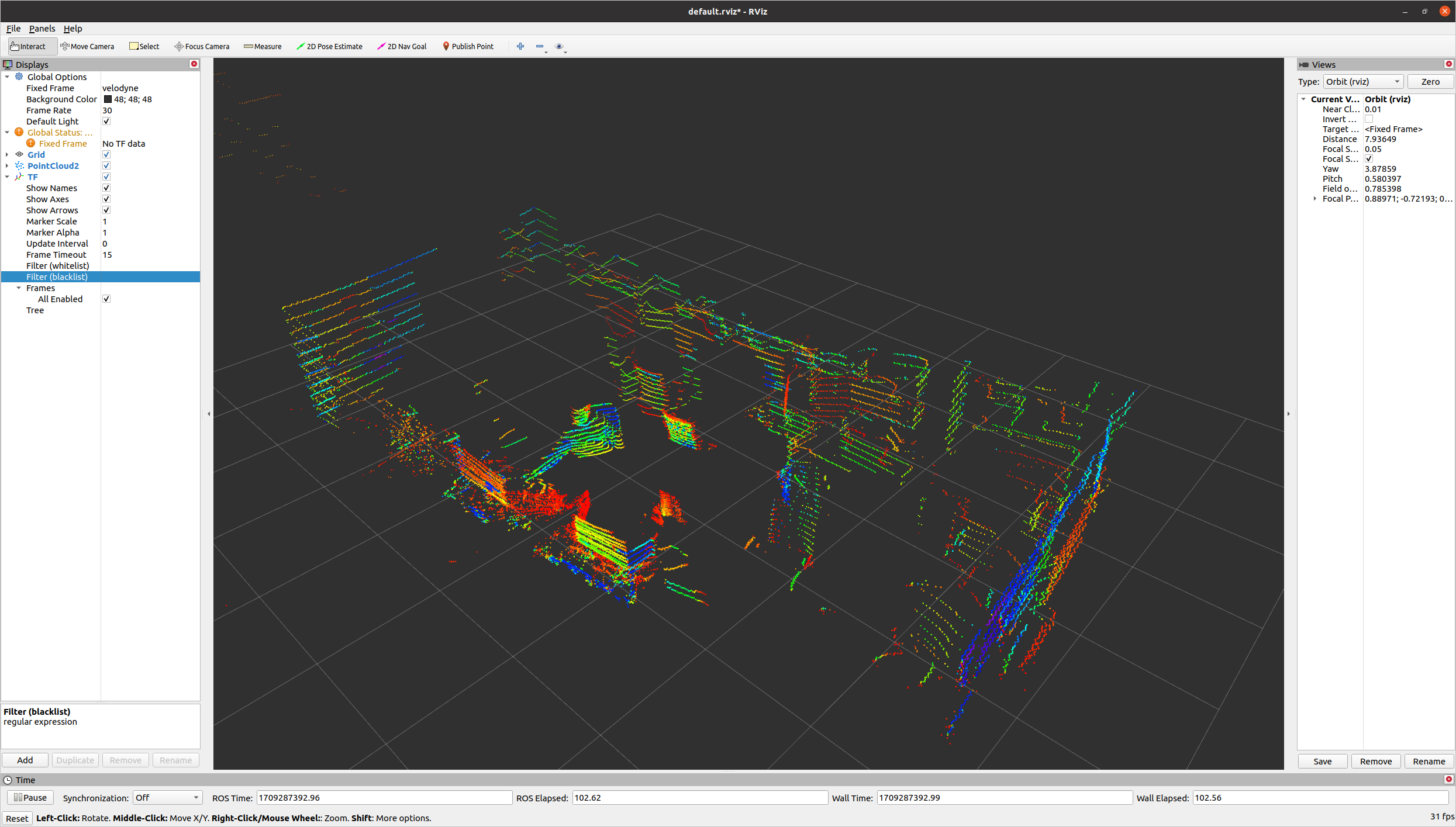
Point cloud가 잘생성된 것을 알 수 있다
<Reference>
https://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16
https://seansun79.tistory.com/8
반응형
'ROS Project🦾' 카테고리의 다른 글
| [ROS] 도커 이미지 (rviz, gazebo) (0) | 2024.03.19 |
|---|---|
| PX4를 이용하여 드론 제어하기 [2] (0) | 2024.02.14 |
| ROS QGroundControl 띄우기 [1] (0) | 2024.02.14 |
| ROS gazebo에서 image 넣기, How to build a world with real image as ground plane (0) | 2024.01.31 |
| jackal_navigation 파라미터 분석하기 (1) | 2024.01.25 |



