기존에 ydlidar_ros_driver를 깃허브에서 소스를 가져와서 G4, X4 등 ydlidar를 즐겨 사용해왔고
이번에 G6 라이다를 사용하려고 하는데 무슨일인지 특정 각도에서 포인트클라우드가 생성되지 않는 이슈가 있었다
문제의 각도는 아래와 같음


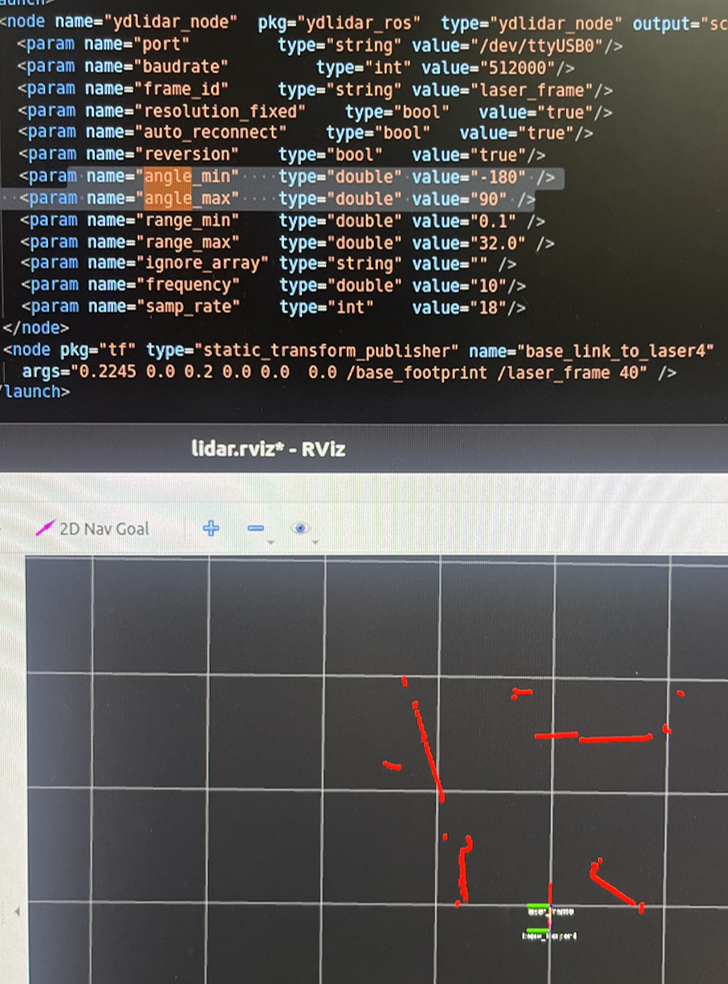

파라미터도 수정해봤지만 뭔가 효과가 없음
시도 1)
윈도우에서 YDLiDAR에서 제공하는 전용 드라이버와 뷰어를 이용하여 라이다에서 문제가 있는지, ROS에서 문제가 있는지 테스트

윈도우 프로그램에서는 정상적으로 작동
그렇다면 ROS가 문제
해결 방법
YDLiDAR에서 제공하는 ydlidar_ros_driver의 sdk에서 저랑 유사한 이슈를 발견한 사람이 있었음
90° blank angle with default settings. · Issue #3 · YDLIDAR/ydlidar_ros_driver
Hi, I have a new YDLIDAR X4 and when I tried to scan the room I get a ~90° blank space. I turned the LIDAR around to make sure that it's not due to some reflection or something. Does anyone know th...
github.com
참고하여 ydlidar_ros_driver가 아닌 아래 링크에서 G6 브랜치를 다운받아서 사용
GitHub - balanceTWK/ydlidar_ros: ydlidar ros package
ydlidar ros package. Contribute to balanceTWK/ydlidar_ros development by creating an account on GitHub.
github.com
결론
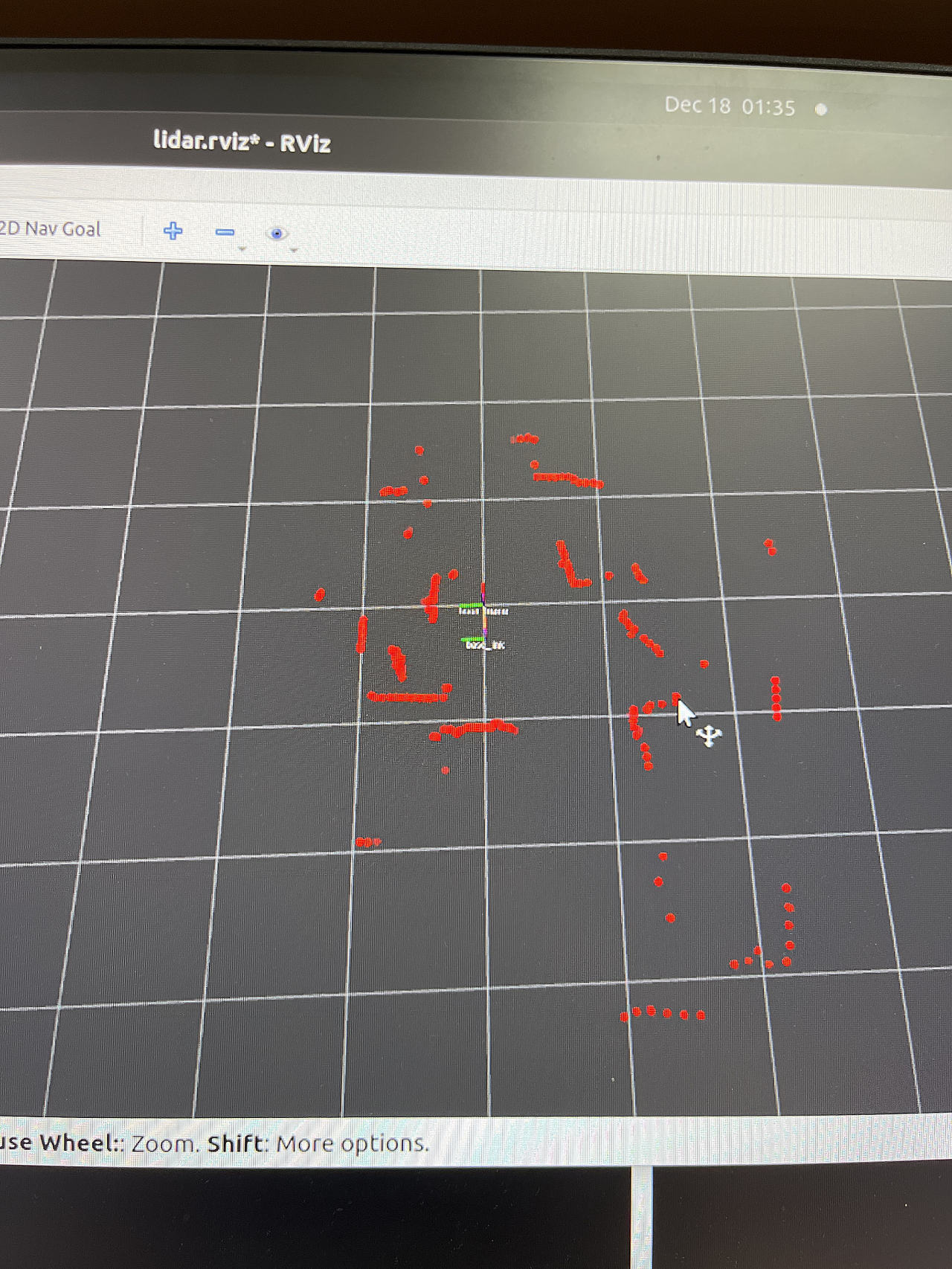
정상적으로 포인트 클라우드가 생기는 것을 확인
100번 구글링해서 안나오는 레퍼런스 없다
읽어주셔서 감사합니다 :)
<reference>
[1] https://www.generationrobots.com/media/ROS-Manual-for-triangular-ranging-YDLIDAR.pdf
'Robotics 🤖 > Ubee' 카테고리의 다른 글
| jackal gazebo에서 VLP-16 사용하기 (5) | 2024.01.02 |
|---|---|
| Ouster LiDAR OS1 32채널 ROS 셋업하기 (rviz) (0) | 2023.12.21 |
| [Ubee] ROS noetic Cartographer 설치하기 (1) | 2023.11.26 |
| [Ubee] catkin_make에서 cakin build로 빌드 툴 변경하기(feat : em Error) (2) | 2023.11.24 |
| cmd_vel topic으로 로봇 액추에이터 구동하기 (0) | 2023.09.16 |



